I semafori smart – Parte 3
In questa terza ed ultima parte testeremo il lavoro fatto fino ad ora. L’intero articolo è dedicato all’analisi dei dati raccolti durante i test effettuati.
Fase di Test
I test sono stati effettuati su tre tipologie di strade diverse, in modo tale da cercare di coprire tutti i possibili scenari di vita quotidiana. Queste strade sono state ovviamente modellate in modo tale da rappresentarle con il simulatore e, proprio per questo, vengono rappresentate le arterie utili alla fine della simulazione. Si passa infatti alla rappresentazione di strade quasi isolate, a strade mediamente trafficate come quelle di città, fino ad arrivare a strade con un altissimo flusso di circolazione, come quelle di Manhattan.
Mappe
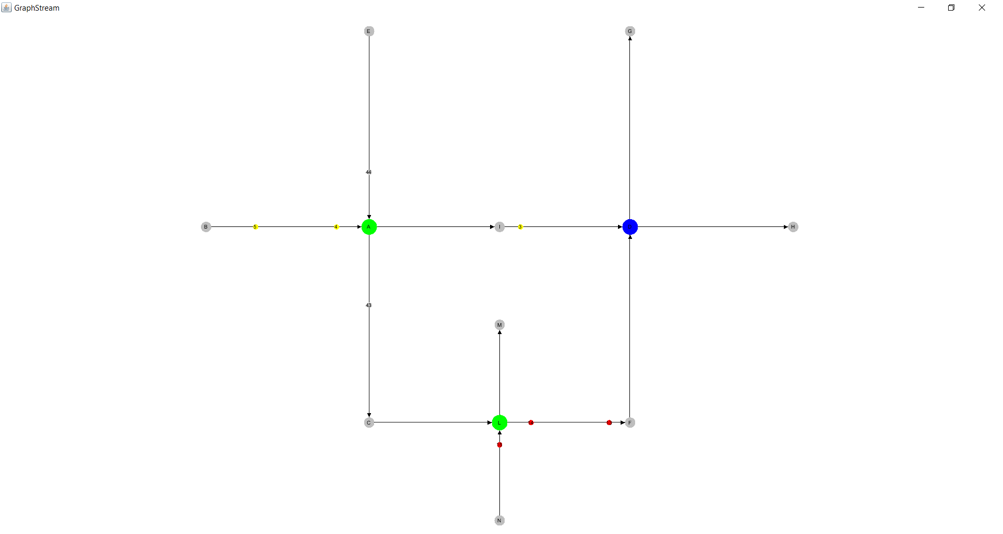
La prima tipologia d’incrocio è stata presa da una zona poco trafficata della città di Amantea (CS).

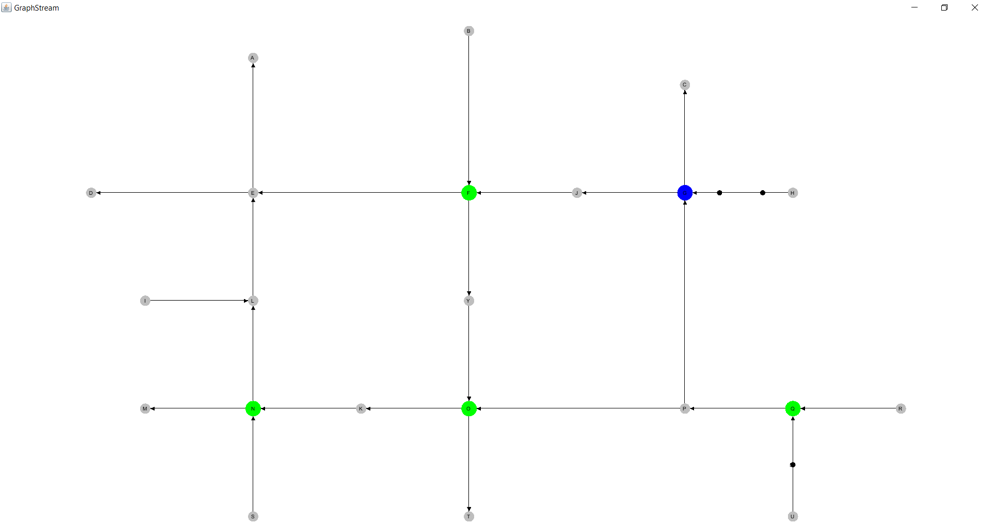
La seconda tipologia rappresenta sempre un incrocio di Amantea, ma questa volta è stata scelta una zona mediamente trafficata in quanto collegata ad uffici pubblici.

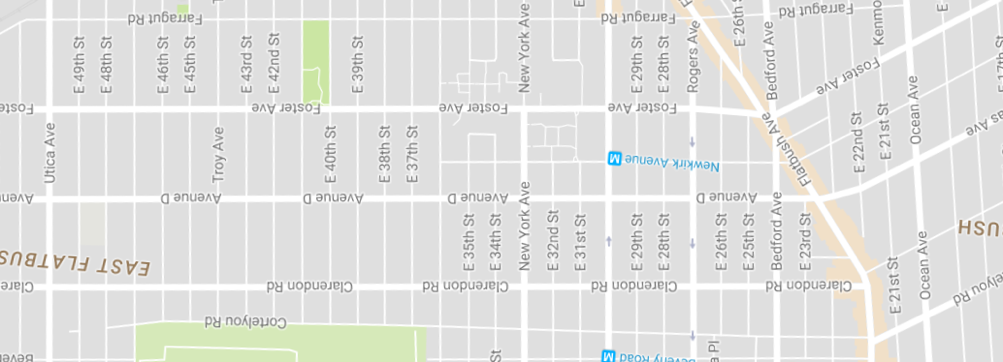
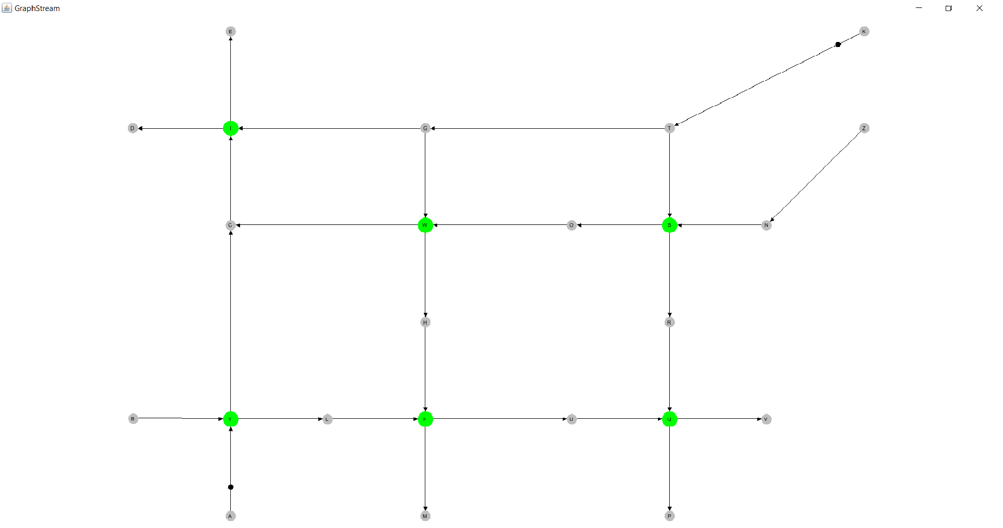
Per rappresentare i primi due incroci è stata scelta proprio Amantea in quanto il team conosce bene la città ed è quindi stato più facile riconoscere degli incroci in cui si modella realmente un flusso facile e uno medio. Per quanto riguarda il flusso difficile, è stata scelta una grande metropoli come Manhattan:
Per ogni incrocio sono stati implementati tre tipi di flussi (configurazione facile, media e difficile), per un totale di nove flussi, su cui sono state fatte girare le tre diverse gestioni (normal, dynamic1, dynamic2). Per alcuni di questi flussi, si è cercato di rendere più dinamica la configurazione, in modo tale da aggiungere imprevedibilità ai flussi, andando quindi a vedere come reagiscono le tre gestioni. Si è quindi arrivati ad eseguire all’incirca cinquanta simulazioni. Le variabili sulle quali siamo andati a porre la nostra attenzione sono state: il numero di campionamenti, il time_Unit e il coefficiente “A”. Dai test effettuati abbiamo quindi ricavato i tempi medi di percorrenza che, rappresentati in grafici excel, vanno a descrivere l’andamento delle varie gestioni in tutte le configurazioni, permettendoci di trarre delle conclusioni.
I test sono stati rappresentati utilizzando due tipologie diverse di grafici collegati fra di loro. Il primo rappresenta il tempo medio di percorrenza di tutte le macchine presenti nella mappa al variare della gestione del semaforo. Il secondo enfatizza i tempi medi di percorrenza per ogni percorso presente nella configurazione. Di seguito i dati elaborati ricavati dai test:
Conclusioni
Numerosi test sono stati effettuati per andare a modellare al meglio le variabili sperimentali delle gestioni. Le due variabili modellate sono state: timeUnit per dynamic1 e numeroCampionamenti per dynamic2. Dopo i risultati, i valori ottimali sono stati un secondo per il timeUnit e tre campionamenti per il dynamic2. Questi due risultati sono scaturiti dal fatto che il dynamic1 utilizza un calcolo lineare e quindi il valore di un secondo va a rispecchiare quello che è il timing del simulatore andando quindi a sincronizzarsi in maniera adeguata ai tempi del semaforo. Nel dynamic2 invece, il numero di campionamenti non influisce in maniera significativa sulle performance dei semafori. Pertanto il valore ottimale è 3 in quanto risparmia ulteriori campionamenti che non porterebbero a sostanziali benefici. Di rilevante importanza, durante la fase di test, è stato il calcolo del peso “A” nell’algoritmo di gestione del dynamic2, tale variabile va ad influire sulla scelta del tempo del semaforo andando a bilanciare l’apporto della storia nel calcolo del nuovo tempo. Per la raccolta dei risultati, nel dynamic2 sono stati effettuati dei pre-test atti a modellare la storia della mappa, che hanno influito positivamente sulle performance di tale gestione in quanto il valore del peso “A”, si andava a evolvere arrivando a un valore ottimale compreso tra 0.1 e 0.3 riuscendo così a “prevedere” in maniera più o meno marcata il comportamento del flusso stradale, cosa che invece non riesce a fare la gestione del dynamic1 non basata sulla storia della mappa. In conclusione le due gestioni sono una valida alternativa al normal e, in quasi tutti i test effettuati, vanno a diminuire i tempi di percorrenza facendo perciò risparmiare tempo agli automobilisti, principale obiettivo della smart mobility. 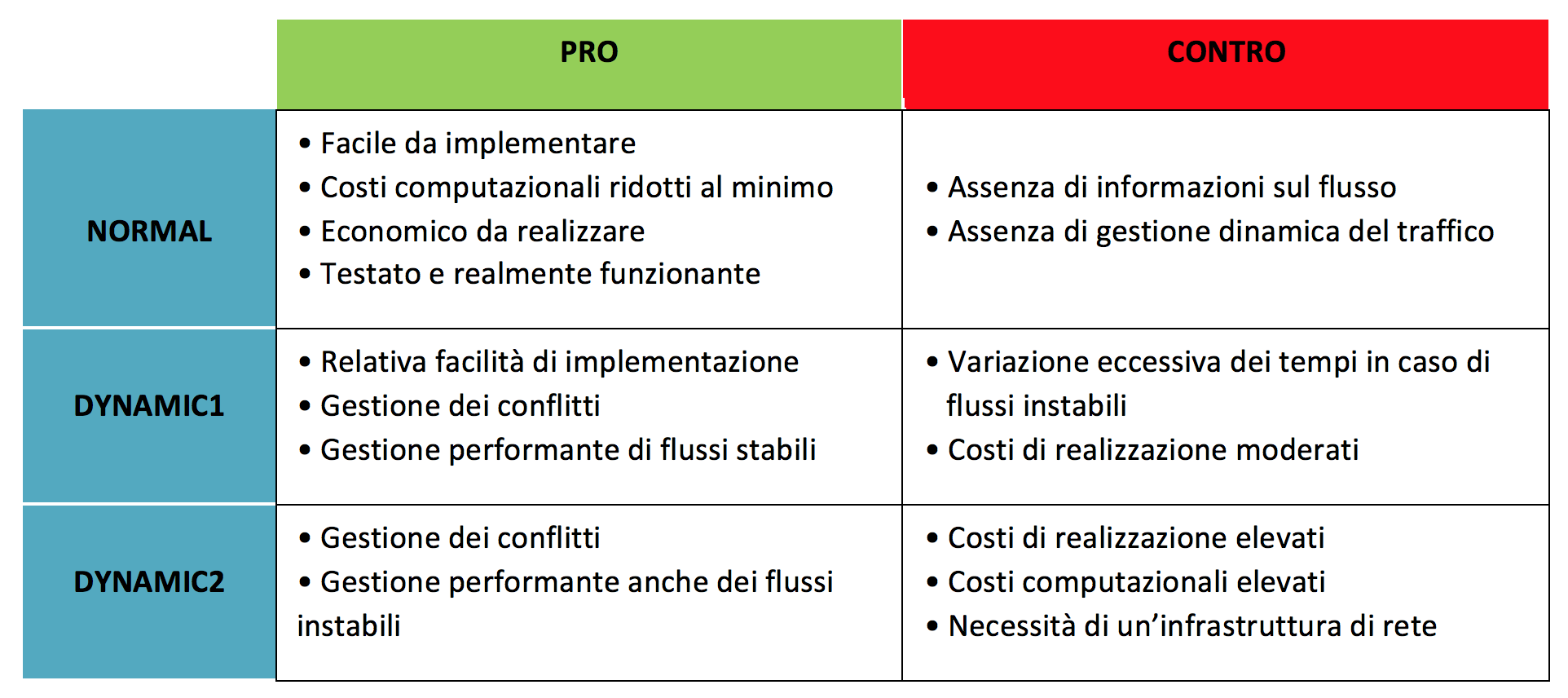
Bibliografia
IBL banca magazine (2015), “Il futuro è delle città intelligenti, ecco cosa sono le smart city”, magazine.iblbanca Ministero del lavoro e delle politiche sociali (2015), “Smart mobility”, GREEN JOBS – Formazione e Orientamento” Marco De Mitri (2017), “Cos’è una smart city?”, SlideShare.net Bilal Ghazal, “Smart Traffic Light Control System”, ieeexplore.ieee.org